
!!! Warning! Do not try this, as this method have bricked my robot. This can be only used only as an example. Before you are changing any advanced configuration settings on controller, make a system backup!!!
In this post I am sharing my experiences on how to add network accessible folder and details on how to do that. While I was doing all that, I have bricked robot, luckily I was able to recover back functional system;, lesson here learned before changing advanced settings you have to have a system backup.
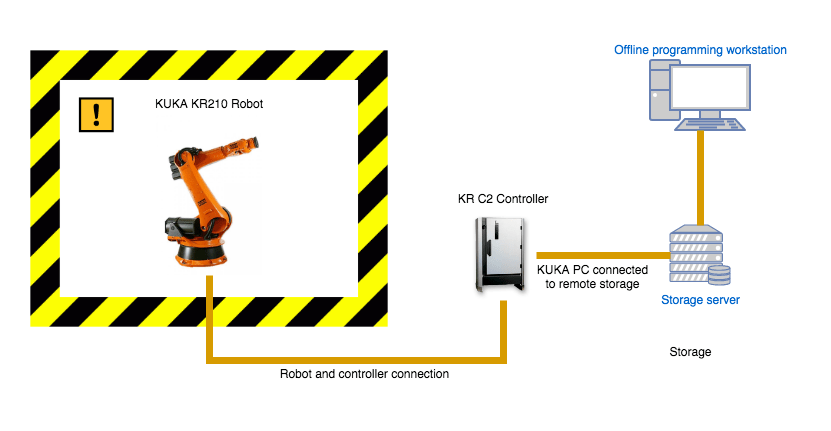
Let me start with necessity that I had. I am working with KUKA KR210 ed2005 robot that is used for 3D milling, the current workshop at factory is as follows. After milling path is generated it has to be copied to USB flash drive, brought to robot controller, doors has to be opened USB device plugged in. Lastly to copy files to correct folder on controller it is required to change usergroup to “Expert” or “Administrator”, find mounted device and copy needed files. A lot of effort to copy program, so i have decided to improve this workflow, make it more straight. Solution here is create network accessible drive where program has to be copied once after what it is available on all devices.
Below is a schematics on desired result. In nutshell on controller we should have connected network drive to which content can be copied from KUKA controller and from offline programming workstation.
Sharing folder
In my case I will be sharing created folder on KRC2 cotroller over network with permissions for only one user. Another option could be mapping drive in KUKA controller that is available externally over SMB protocol. In this case some remote “server” will be needed to which controller will be connecting.
Before we can continue with folder creation, user creation and configurations we have to know how to access Windows on pendant device.
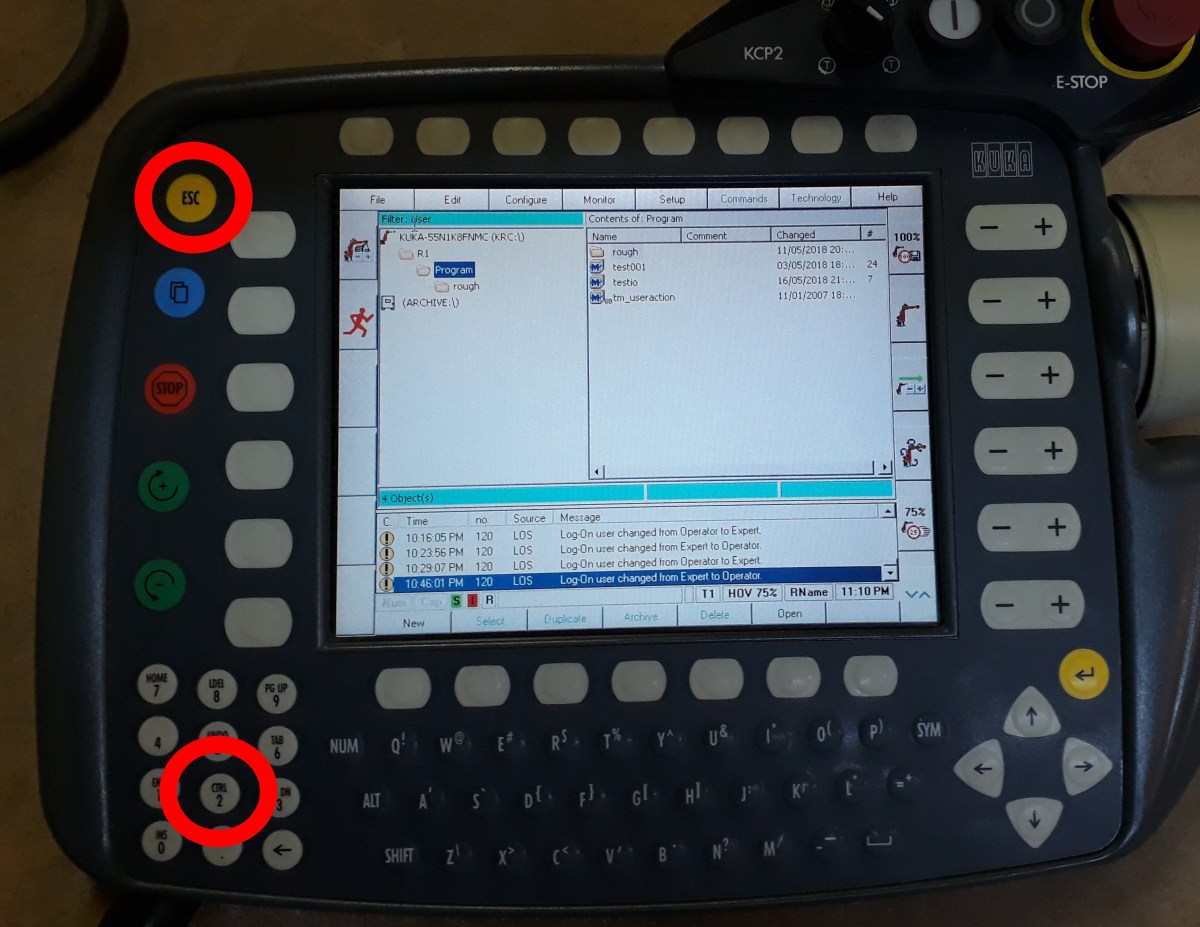
On Pendant KUKA HMI is available all the time, but behind that Windows XP embedded is running. To access Windows user interface it is necessary to log into “Expert” and press ESC + CTRL, then Start menu will appear, if menu is not appearing check if Numpad is not activated (Num label in old on lower left corner). Buttons to be pressed to access Start menu are shown in in image below (ESC + CTRL).
When Start menu is available launch “Run” application and write compmgmt.msc and Computer Management window appears.

Go to Local Users and Groups -> Users click “New user…” a new window opens where you can set username, description, password and other settings. This image above is representative, in KRC2 there are many other users listed.
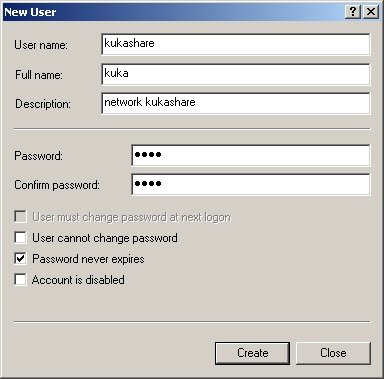
I have created my folder under D:/ drive and called it “kukashare”. Then it is necessary to go to folder sharing options and share it over network.
!!! User creation is needed if it is required to limit access to the drive, in my case over the LAN network “kukashare” user will have permissions to read/write. User creation can be skipped and folder can be set available to Everyone. This can be changed at folder sharing tab in folder properties!!!
Last action would be map folder to a drive and to do that go to My Computer and go to Tools -> Map drive. Select needed drive name and click Finish. In my case i used option to use different credentials, here I used kukashare user.
OS for my controller is in German, I had some troubles finding right selections, buttons and menu.
!!!Warning!!! How I bricked my robot
Steps described here have crippled controller system, do not try this!
To enable network sharing I have launched network sharing wizard, changed workgroup name to default value “workgroup” and on overview page clicked Next after what wizard started to copy some files and I have lost control over KUKA robot, pendant keyboard stopped to work and it was not possible to launch successfully KSS software. To my delight I did not have a backup image of drive in operational state. I gained hard lesson that before tinkering with advanced settings you always have to have a backup otherwise after unsuccessful changes to the system you can make robot nonfunctional.
Key point here: Do not launch Networking wizard as it is changeling something to the system and it can stops working. KRC2 controller has 2 network adapters one is integrated Intel adapter (which I am intending to connect to LAN) and other VixWin adapter which is driving shared memory functionality for real time system to work.
I have no way of testing that but correct way should be just enable network sharing with out Network Wizard. Here is video on how that should be done, probably. Have to tested if this does not brick KRC2 controller as well. https://www.youtube.com/watch?v=E8ADSDC20YE
After I bricked KUKA controler.
When I did that, I learned importance of the system image, if I had one i could recover system to operational state easily. Backup activity was planned sometime in future after all configurations were in place.
But before I was going to modify anything further I was determined to make a system image, create a duplicate and then try recovering system on an image not on original drive.
After search on internet for backup software found Clonezilla and open source drive cloning software. First I tried with installed application on Ubuntu system, but that was unsuccessful. After that I created a Live USB with Clonezilla and then was able to make a backup easily. Clonezilla interface is easy to understand, notes are available on every screen, nut you have to be very careful, because if you mix drives then you can erase wrong drive so be very careful and read all notes to be sure.

It is not easy to find ATA HDD drives, luckily I had one old PC which had 40 GB drive. For image creation I was using newer system with no IDE 40pin bus, to make a connection with motherboard i was using adapter for SATA controllers.
With a cloned drive I was more confident with trying different things, and first thing that I tried was reinstalling KSS which is available in D:/ drive folder. Went through all the steps and after software was installed, system rebooted and it started KUKA HMI with a functional system. I have not lost calibration after these steps.
Conclusion
Have successful improved workflow, now it is much easier and quicker to load new program and learned valuable lesson about backups.
Reverences:
- Clonezilla software – http://www.clonezilla.org/
- Installing KSS – KUKA Install manual
- Network Drive Sharing – https://www.youtube.com/watch?v=E8ADSDC20YE
- Harting RJ45 connector – https://www.elfadistrelec.lv/lv/rj45-jack-harting-09-45-215-1560/p/11042592
